
|
|
|
 View on GitHub View on GitHub
|
|
|
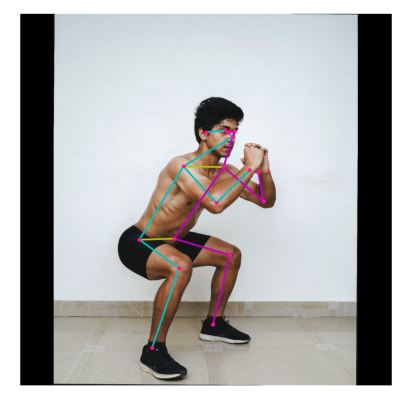
MoveNet is an ultra fast and accurate model that detects 17 keypoints of a body. The model is offered on TF Hub with two variants, known as Lightning and Thunder. Lightning is intended for latency-critical applications, while Thunder is intended for applications that require high accuracy. Both models run faster than real time (30+ FPS) on most modern desktops, laptops, and phones, which proves crucial for live fitness, health, and wellness applications.

*Images downloaded from Pexels (https://www.pexels.com/)
This Colab walks you through the details of how to load MoveNet, and run inference on the input image and video below.
Human Pose Estimation with MoveNet
Visualization libraries & Imports
pip install -q imageiopip install -q opencv-pythonpip install -q git+https://github.com/tensorflow/docs
import tensorflow as tf
import tensorflow_hub as hub
from tensorflow_docs.vis import embed
import numpy as np
import cv2
# Import matplotlib libraries
from matplotlib import pyplot as plt
from matplotlib.collections import LineCollection
import matplotlib.patches as patches
# Some modules to display an animation using imageio.
import imageio
from IPython.display import HTML, display
Helper functions for visualization
# Dictionary that maps from joint names to keypoint indices.
KEYPOINT_DICT = {
'nose': 0,
'left_eye': 1,
'right_eye': 2,
'left_ear': 3,
'right_ear': 4,
'left_shoulder': 5,
'right_shoulder': 6,
'left_elbow': 7,
'right_elbow': 8,
'left_wrist': 9,
'right_wrist': 10,
'left_hip': 11,
'right_hip': 12,
'left_knee': 13,
'right_knee': 14,
'left_ankle': 15,
'right_ankle': 16
}
# Maps bones to a matplotlib color name.
KEYPOINT_EDGE_INDS_TO_COLOR = {
(0, 1): 'm',
(0, 2): 'c',
(1, 3): 'm',
(2, 4): 'c',
(0, 5): 'm',
(0, 6): 'c',
(5, 7): 'm',
(7, 9): 'm',
(6, 8): 'c',
(8, 10): 'c',
(5, 6): 'y',
(5, 11): 'm',
(6, 12): 'c',
(11, 12): 'y',
(11, 13): 'm',
(13, 15): 'm',
(12, 14): 'c',
(14, 16): 'c'
}
def _keypoints_and_edges_for_display(keypoints_with_scores,
height,
width,
keypoint_threshold=0.11):
"""Returns high confidence keypoints and edges for visualization.
Args:
keypoints_with_scores: A numpy array with shape [1, 1, 17, 3] representing
the keypoint coordinates and scores returned from the MoveNet model.
height: height of the image in pixels.
width: width of the image in pixels.
keypoint_threshold: minimum confidence score for a keypoint to be
visualized.
Returns:
A (keypoints_xy, edges_xy, edge_colors) containing:
* the coordinates of all keypoints of all detected entities;
* the coordinates of all skeleton edges of all detected entities;
* the colors in which the edges should be plotted.
"""
keypoints_all = []
keypoint_edges_all = []
edge_colors = []
num_instances, _, _, _ = keypoints_with_scores.shape
for idx in range(num_instances):
kpts_x = keypoints_with_scores[0, idx, :, 1]
kpts_y = keypoints_with_scores[0, idx, :, 0]
kpts_scores = keypoints_with_scores[0, idx, :, 2]
kpts_absolute_xy = np.stack(
[width * np.array(kpts_x), height * np.array(kpts_y)], axis=-1)
kpts_above_thresh_absolute = kpts_absolute_xy[
kpts_scores > keypoint_threshold, :]
keypoints_all.append(kpts_above_thresh_absolute)
for edge_pair, color in KEYPOINT_EDGE_INDS_TO_COLOR.items():
if (kpts_scores[edge_pair[0]] > keypoint_threshold and
kpts_scores[edge_pair[1]] > keypoint_threshold):
x_start = kpts_absolute_xy[edge_pair[0], 0]
y_start = kpts_absolute_xy[edge_pair[0], 1]
x_end = kpts_absolute_xy[edge_pair[1], 0]
y_end = kpts_absolute_xy[edge_pair[1], 1]
line_seg = np.array([[x_start, y_start], [x_end, y_end]])
keypoint_edges_all.append(line_seg)
edge_colors.append(color)
if keypoints_all:
keypoints_xy = np.concatenate(keypoints_all, axis=0)
else:
keypoints_xy = np.zeros((0, 17, 2))
if keypoint_edges_all:
edges_xy = np.stack(keypoint_edges_all, axis=0)
else:
edges_xy = np.zeros((0, 2, 2))
return keypoints_xy, edges_xy, edge_colors
def draw_prediction_on_image(
image, keypoints_with_scores, crop_region=None, close_figure=False,
output_image_height=None):
"""Draws the keypoint predictions on image.
Args:
image: A numpy array with shape [height, width, channel] representing the
pixel values of the input image.
keypoints_with_scores: A numpy array with shape [1, 1, 17, 3] representing
the keypoint coordinates and scores returned from the MoveNet model.
crop_region: A dictionary that defines the coordinates of the bounding box
of the crop region in normalized coordinates (see the init_crop_region
function below for more detail). If provided, this function will also
draw the bounding box on the image.
output_image_height: An integer indicating the height of the output image.
Note that the image aspect ratio will be the same as the input image.
Returns:
A numpy array with shape [out_height, out_width, channel] representing the
image overlaid with keypoint predictions.
"""
height, width, channel = image.shape
aspect_ratio = float(width) / height
fig, ax = plt.subplots(figsize=(12 * aspect_ratio, 12))
# To remove the huge white borders
fig.tight_layout(pad=0)
ax.margins(0)
ax.set_yticklabels([])
ax.set_xticklabels([])
plt.axis('off')
im = ax.imshow(image)
line_segments = LineCollection([], linewidths=(4), linestyle='solid')
ax.add_collection(line_segments)
# Turn off tick labels
scat = ax.scatter([], [], s=60, color='#FF1493', zorder=3)
(keypoint_locs, keypoint_edges,
edge_colors) = _keypoints_and_edges_for_display(
keypoints_with_scores, height, width)
line_segments.set_segments(keypoint_edges)
line_segments.set_color(edge_colors)
if keypoint_edges.shape[0]:
line_segments.set_segments(keypoint_edges)
line_segments.set_color(edge_colors)
if keypoint_locs.shape[0]:
scat.set_offsets(keypoint_locs)
if crop_region is not None:
xmin = max(crop_region['x_min'] * width, 0.0)
ymin = max(crop_region['y_min'] * height, 0.0)
rec_width = min(crop_region['x_max'], 0.99) * width - xmin
rec_height = min(crop_region['y_max'], 0.99) * height - ymin
rect = patches.Rectangle(
(xmin,ymin),rec_width,rec_height,
linewidth=1,edgecolor='b',facecolor='none')
ax.add_patch(rect)
fig.canvas.draw()
image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8)
image_from_plot = image_from_plot.reshape(
fig.canvas.get_width_height()[::-1] + (3,))
plt.close(fig)
if output_image_height is not None:
output_image_width = int(output_image_height / height * width)
image_from_plot = cv2.resize(
image_from_plot, dsize=(output_image_width, output_image_height),
interpolation=cv2.INTER_CUBIC)
return image_from_plot
def to_gif(images, duration):
"""Converts image sequence (4D numpy array) to gif."""
imageio.mimsave('./animation.gif', images, duration=duration)
return embed.embed_file('./animation.gif')
def progress(value, max=100):
return HTML("""
<progress
value='{value}'
max='{max}',
style='width: 100%'
>
{value}
</progress>
""".format(value=value, max=max))
Load Model from TF hub
model_name = "movenet_lightning"
if "tflite" in model_name:
if "movenet_lightning_f16" in model_name:
!wget -q -O model.tflite https://tfhub.dev/google/lite-model/movenet/singlepose/lightning/tflite/float16/4?lite-format=tflite
input_size = 192
elif "movenet_thunder_f16" in model_name:
!wget -q -O model.tflite https://tfhub.dev/google/lite-model/movenet/singlepose/thunder/tflite/float16/4?lite-format=tflite
input_size = 256
elif "movenet_lightning_int8" in model_name:
!wget -q -O model.tflite https://tfhub.dev/google/lite-model/movenet/singlepose/lightning/tflite/int8/4?lite-format=tflite
input_size = 192
elif "movenet_thunder_int8" in model_name:
!wget -q -O model.tflite https://tfhub.dev/google/lite-model/movenet/singlepose/thunder/tflite/int8/4?lite-format=tflite
input_size = 256
else:
raise ValueError("Unsupported model name: %s" % model_name)
# Initialize the TFLite interpreter
interpreter = tf.lite.Interpreter(model_path="model.tflite")
interpreter.allocate_tensors()
def movenet(input_image):
"""Runs detection on an input image.
Args:
input_image: A [1, height, width, 3] tensor represents the input image
pixels. Note that the height/width should already be resized and match the
expected input resolution of the model before passing into this function.
Returns:
A [1, 1, 17, 3] float numpy array representing the predicted keypoint
coordinates and scores.
"""
# TF Lite format expects tensor type of uint8.
input_image = tf.cast(input_image, dtype=tf.uint8)
input_details = interpreter.get_input_details()
output_details = interpreter.get_output_details()
interpreter.set_tensor(input_details[0]['index'], input_image.numpy())
# Invoke inference.
interpreter.invoke()
# Get the model prediction.
keypoints_with_scores = interpreter.get_tensor(output_details[0]['index'])
return keypoints_with_scores
else:
if "movenet_lightning" in model_name:
module = hub.load("https://tfhub.dev/google/movenet/singlepose/lightning/4")
input_size = 192
elif "movenet_thunder" in model_name:
module = hub.load("https://tfhub.dev/google/movenet/singlepose/thunder/4")
input_size = 256
else:
raise ValueError("Unsupported model name: %s" % model_name)
def movenet(input_image):
"""Runs detection on an input image.
Args:
input_image: A [1, height, width, 3] tensor represents the input image
pixels. Note that the height/width should already be resized and match the
expected input resolution of the model before passing into this function.
Returns:
A [1, 1, 17, 3] float numpy array representing the predicted keypoint
coordinates and scores.
"""
model = module.signatures['serving_default']
# SavedModel format expects tensor type of int32.
input_image = tf.cast(input_image, dtype=tf.int32)
# Run model inference.
outputs = model(input_image)
# Output is a [1, 1, 17, 3] tensor.
keypoints_with_scores = outputs['output_0'].numpy()
return keypoints_with_scores
2024-03-09 15:01:44.320490: E external/local_xla/xla/stream_executor/cuda/cuda_driver.cc:282] failed call to cuInit: CUDA_ERROR_NO_DEVICE: no CUDA-capable device is detected
Single Image Example
This session demonstrates the minimum working example of running the model on a single image to predict the 17 human keypoints.
Load Input Image
curl -o input_image.jpeg https://images.pexels.com/photos/4384679/pexels-photo-4384679.jpeg --silent# Load the input image.
image_path = 'input_image.jpeg'
image = tf.io.read_file(image_path)
image = tf.image.decode_jpeg(image)
Run Inference
# Resize and pad the image to keep the aspect ratio and fit the expected size.
input_image = tf.expand_dims(image, axis=0)
input_image = tf.image.resize_with_pad(input_image, input_size, input_size)
# Run model inference.
keypoints_with_scores = movenet(input_image)
# Visualize the predictions with image.
display_image = tf.expand_dims(image, axis=0)
display_image = tf.cast(tf.image.resize_with_pad(
display_image, 1280, 1280), dtype=tf.int32)
output_overlay = draw_prediction_on_image(
np.squeeze(display_image.numpy(), axis=0), keypoints_with_scores)
plt.figure(figsize=(5, 5))
plt.imshow(output_overlay)
_ = plt.axis('off')
/tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8)
Video (Image Sequence) Example
This section demonstrates how to apply intelligent cropping based on detections from the previous frame when the input is a sequence of frames. This allows the model to devote its attention and resources to the main subject, resulting in much better prediction quality without sacrificing the speed.
Cropping Algorithm
# Confidence score to determine whether a keypoint prediction is reliable.
MIN_CROP_KEYPOINT_SCORE = 0.2
def init_crop_region(image_height, image_width):
"""Defines the default crop region.
The function provides the initial crop region (pads the full image from both
sides to make it a square image) when the algorithm cannot reliably determine
the crop region from the previous frame.
"""
if image_width > image_height:
box_height = image_width / image_height
box_width = 1.0
y_min = (image_height / 2 - image_width / 2) / image_height
x_min = 0.0
else:
box_height = 1.0
box_width = image_height / image_width
y_min = 0.0
x_min = (image_width / 2 - image_height / 2) / image_width
return {
'y_min': y_min,
'x_min': x_min,
'y_max': y_min + box_height,
'x_max': x_min + box_width,
'height': box_height,
'width': box_width
}
def torso_visible(keypoints):
"""Checks whether there are enough torso keypoints.
This function checks whether the model is confident at predicting one of the
shoulders/hips which is required to determine a good crop region.
"""
return ((keypoints[0, 0, KEYPOINT_DICT['left_hip'], 2] >
MIN_CROP_KEYPOINT_SCORE or
keypoints[0, 0, KEYPOINT_DICT['right_hip'], 2] >
MIN_CROP_KEYPOINT_SCORE) and
(keypoints[0, 0, KEYPOINT_DICT['left_shoulder'], 2] >
MIN_CROP_KEYPOINT_SCORE or
keypoints[0, 0, KEYPOINT_DICT['right_shoulder'], 2] >
MIN_CROP_KEYPOINT_SCORE))
def determine_torso_and_body_range(
keypoints, target_keypoints, center_y, center_x):
"""Calculates the maximum distance from each keypoints to the center location.
The function returns the maximum distances from the two sets of keypoints:
full 17 keypoints and 4 torso keypoints. The returned information will be
used to determine the crop size. See determineCropRegion for more detail.
"""
torso_joints = ['left_shoulder', 'right_shoulder', 'left_hip', 'right_hip']
max_torso_yrange = 0.0
max_torso_xrange = 0.0
for joint in torso_joints:
dist_y = abs(center_y - target_keypoints[joint][0])
dist_x = abs(center_x - target_keypoints[joint][1])
if dist_y > max_torso_yrange:
max_torso_yrange = dist_y
if dist_x > max_torso_xrange:
max_torso_xrange = dist_x
max_body_yrange = 0.0
max_body_xrange = 0.0
for joint in KEYPOINT_DICT.keys():
if keypoints[0, 0, KEYPOINT_DICT[joint], 2] < MIN_CROP_KEYPOINT_SCORE:
continue
dist_y = abs(center_y - target_keypoints[joint][0]);
dist_x = abs(center_x - target_keypoints[joint][1]);
if dist_y > max_body_yrange:
max_body_yrange = dist_y
if dist_x > max_body_xrange:
max_body_xrange = dist_x
return [max_torso_yrange, max_torso_xrange, max_body_yrange, max_body_xrange]
def determine_crop_region(
keypoints, image_height,
image_width):
"""Determines the region to crop the image for the model to run inference on.
The algorithm uses the detected joints from the previous frame to estimate
the square region that encloses the full body of the target person and
centers at the midpoint of two hip joints. The crop size is determined by
the distances between each joints and the center point.
When the model is not confident with the four torso joint predictions, the
function returns a default crop which is the full image padded to square.
"""
target_keypoints = {}
for joint in KEYPOINT_DICT.keys():
target_keypoints[joint] = [
keypoints[0, 0, KEYPOINT_DICT[joint], 0] * image_height,
keypoints[0, 0, KEYPOINT_DICT[joint], 1] * image_width
]
if torso_visible(keypoints):
center_y = (target_keypoints['left_hip'][0] +
target_keypoints['right_hip'][0]) / 2;
center_x = (target_keypoints['left_hip'][1] +
target_keypoints['right_hip'][1]) / 2;
(max_torso_yrange, max_torso_xrange,
max_body_yrange, max_body_xrange) = determine_torso_and_body_range(
keypoints, target_keypoints, center_y, center_x)
crop_length_half = np.amax(
[max_torso_xrange * 1.9, max_torso_yrange * 1.9,
max_body_yrange * 1.2, max_body_xrange * 1.2])
tmp = np.array(
[center_x, image_width - center_x, center_y, image_height - center_y])
crop_length_half = np.amin(
[crop_length_half, np.amax(tmp)]);
crop_corner = [center_y - crop_length_half, center_x - crop_length_half];
if crop_length_half > max(image_width, image_height) / 2:
return init_crop_region(image_height, image_width)
else:
crop_length = crop_length_half * 2;
return {
'y_min': crop_corner[0] / image_height,
'x_min': crop_corner[1] / image_width,
'y_max': (crop_corner[0] + crop_length) / image_height,
'x_max': (crop_corner[1] + crop_length) / image_width,
'height': (crop_corner[0] + crop_length) / image_height -
crop_corner[0] / image_height,
'width': (crop_corner[1] + crop_length) / image_width -
crop_corner[1] / image_width
}
else:
return init_crop_region(image_height, image_width)
def crop_and_resize(image, crop_region, crop_size):
"""Crops and resize the image to prepare for the model input."""
boxes=[[crop_region['y_min'], crop_region['x_min'],
crop_region['y_max'], crop_region['x_max']]]
output_image = tf.image.crop_and_resize(
image, box_indices=[0], boxes=boxes, crop_size=crop_size)
return output_image
def run_inference(movenet, image, crop_region, crop_size):
"""Runs model inference on the cropped region.
The function runs the model inference on the cropped region and updates the
model output to the original image coordinate system.
"""
image_height, image_width, _ = image.shape
input_image = crop_and_resize(
tf.expand_dims(image, axis=0), crop_region, crop_size=crop_size)
# Run model inference.
keypoints_with_scores = movenet(input_image)
# Update the coordinates.
for idx in range(17):
keypoints_with_scores[0, 0, idx, 0] = (
crop_region['y_min'] * image_height +
crop_region['height'] * image_height *
keypoints_with_scores[0, 0, idx, 0]) / image_height
keypoints_with_scores[0, 0, idx, 1] = (
crop_region['x_min'] * image_width +
crop_region['width'] * image_width *
keypoints_with_scores[0, 0, idx, 1]) / image_width
return keypoints_with_scores
Load Input Image Sequence
wget -q -O dance.gif https://github.com/tensorflow/tfjs-models/raw/master/pose-detection/assets/dance_input.gif# Load the input image.
image_path = 'dance.gif'
image = tf.io.read_file(image_path)
image = tf.image.decode_gif(image)
Run Inference with Cropping Algorithm
# Load the input image.
num_frames, image_height, image_width, _ = image.shape
crop_region = init_crop_region(image_height, image_width)
output_images = []
bar = display(progress(0, num_frames-1), display_id=True)
for frame_idx in range(num_frames):
keypoints_with_scores = run_inference(
movenet, image[frame_idx, :, :, :], crop_region,
crop_size=[input_size, input_size])
output_images.append(draw_prediction_on_image(
image[frame_idx, :, :, :].numpy().astype(np.int32),
keypoints_with_scores, crop_region=None,
close_figure=True, output_image_height=300))
crop_region = determine_crop_region(
keypoints_with_scores, image_height, image_width)
bar.update(progress(frame_idx, num_frames-1))
# Prepare gif visualization.
output = np.stack(output_images, axis=0)
to_gif(output, duration=100)
/tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8) /tmpfs/tmp/ipykernel_112701/2693263076.py:162: MatplotlibDeprecationWarning: The tostring_rgb function was deprecated in Matplotlib 3.8 and will be removed two minor releases later. Use buffer_rgba instead. image_from_plot = np.frombuffer(fig.canvas.tostring_rgb(), dtype=np.uint8)
